3 mengubah file dengan 14 tambahan dan 0 penghapusan
+ 14
- 0
docs/程序功能描述与设计思路.txt
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
TEMPAT SAMPAH
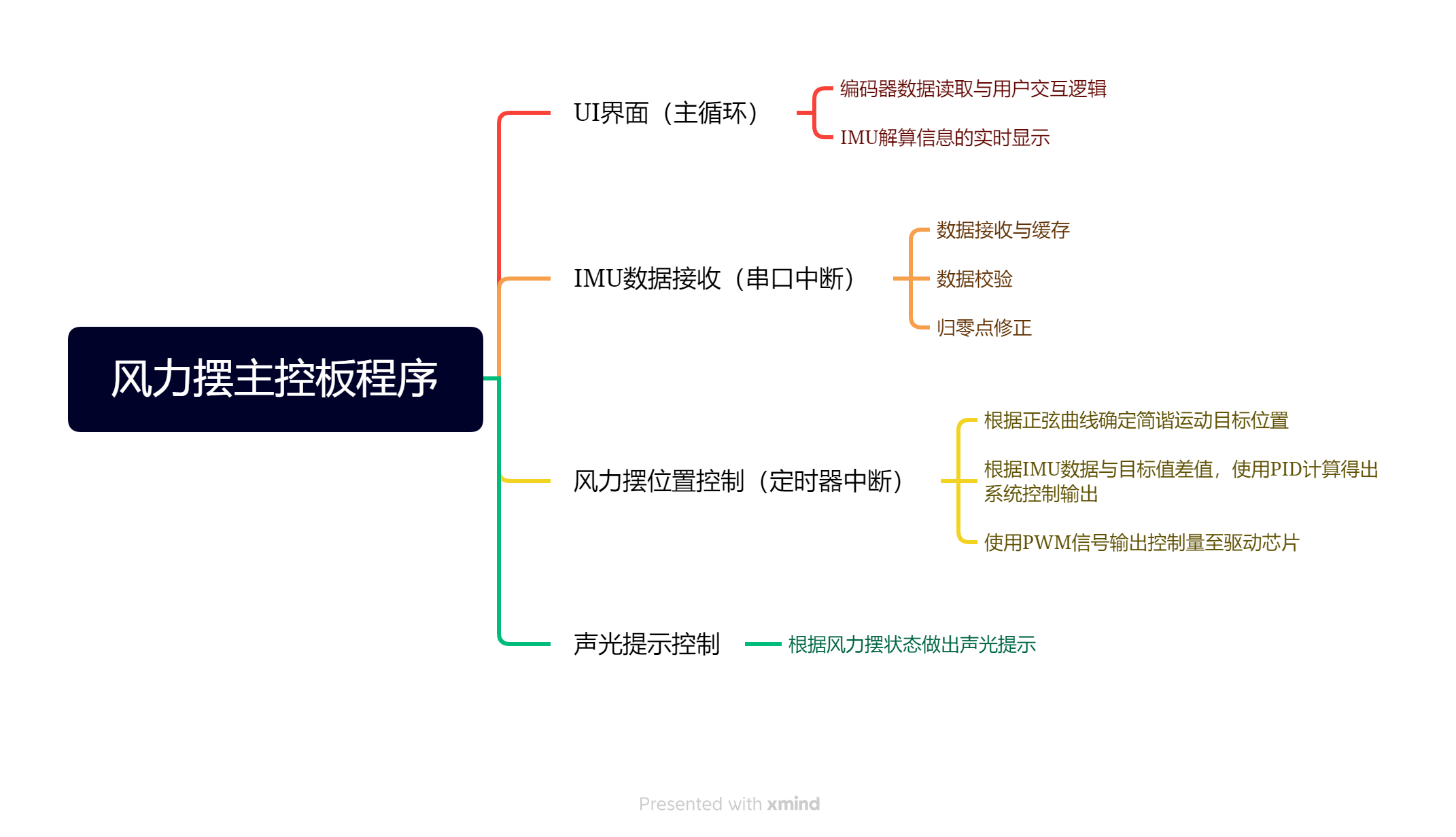
docs/风力摆主控板程序流程图.png
{kind=link}